PhotoRobot Laser Centreren & Uitlijning Gids
Deze handleiding voor gebruikersondersteuning bevat technische instructies voor het uitlijnen en centreren van PhotoRobot ingebouwde kruislasersystemen. Volg deze stappen om het middelpunt van een ronde PhotoRobot-plaat te vinden met behulp van twee lasers. Instructies zijn onder meer hoe de lasers fysiek naar het midden van de tafel moeten worden verplaatst, initiële laserinstellingen en hoe de laserpositionering moet worden verfijnd. Daarnaast staan er aan het einde van de handleiding instructies voor het uitlijnen en centreren van het speciale lasersysteem van de C1300 draaitafel (voorheen gedistribueerd onder de naam Case 1300).
Belangrijk: Raadpleeg altijd eerst de veiligheidsinformatie en -instructies van PhotoRobot naast de handleiding die specifiek bij uw apparaat is geleverd voordat u het zelf installeert of onderhoudt.
Notitie: Raadpleeg PhotoRobot First Use & Basic Testing voor gedetailleerde informatie over netwerkconfiguratie en netwerkvereisten.
1. Verplaats lasers fysiek naar het midden van de tafel
1.1. Voordat u aan de slag gaat, moet u een verbinding tot stand brengen tussen de PhotoRobot en het lokale netwerk. Schakel vervolgens de besturingseenheid (6e generatie) en een laserbox in.
Notitie: Raadpleeg ook de speciale instructies in hoofdstuk 4 van deze gebruikershandleiding om het lasersysteem voor de C1300-platenspeler uit te lijnen en te centreren.
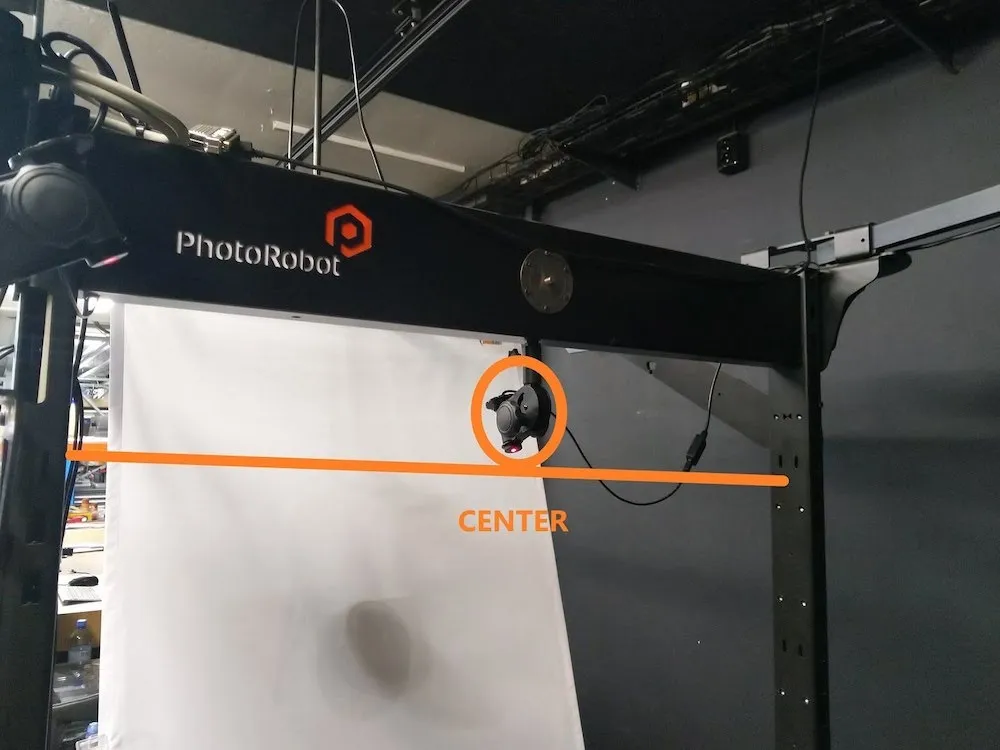
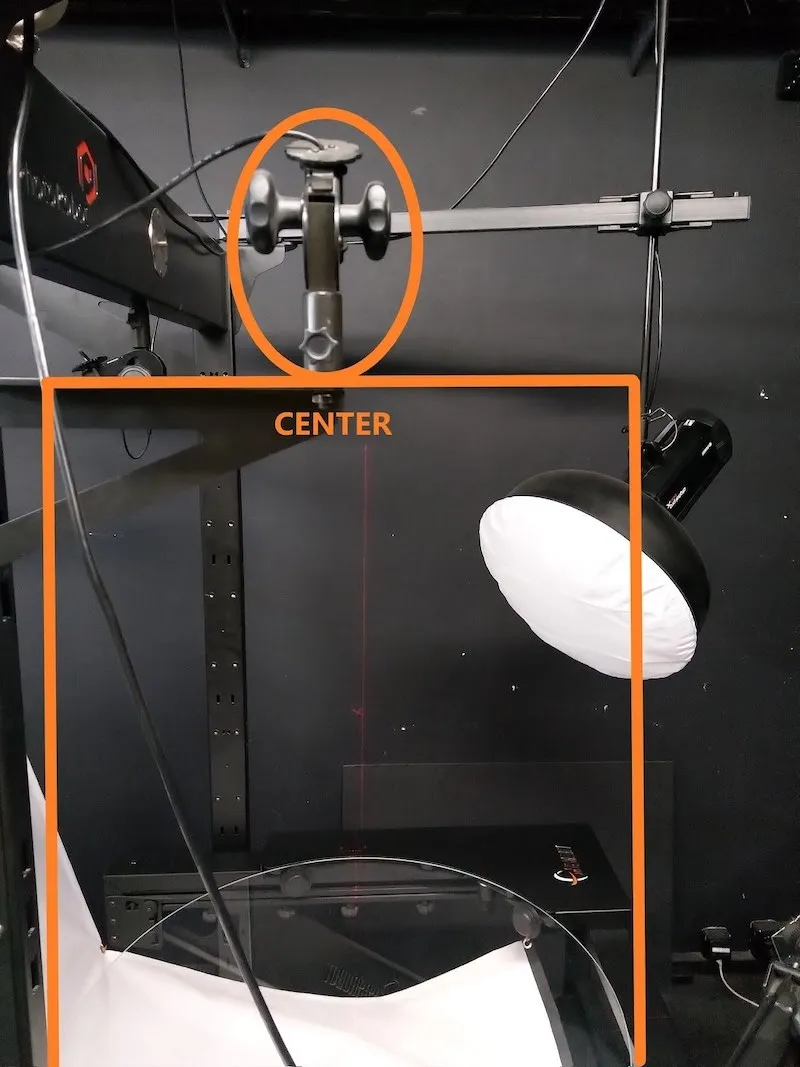
1.2. Nadat u PhotoRobot op het netwerk hebt aangesloten en de besturingseenheid en laserbox hebt ingeschakeld, meet u de afstand tussen beide zijden van de tafel waar de laser is gemonteerd. Draai of verplaats de laser vervolgens met de hand naar het midden en bevestig de laser in positie.
2. Ruwe instellingen schatten
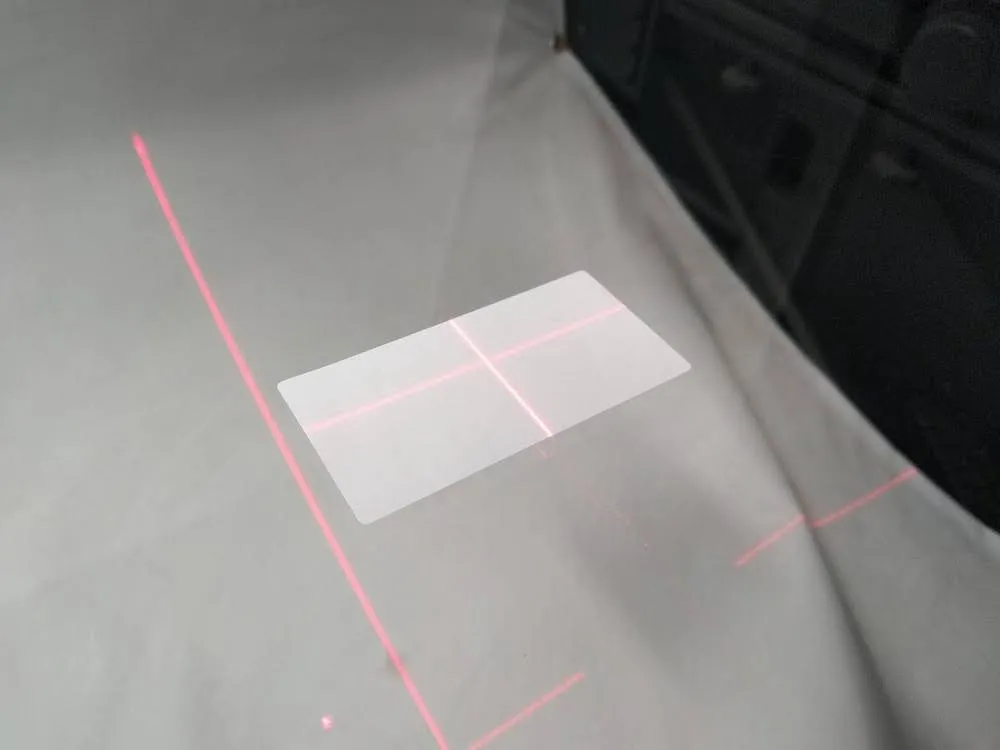
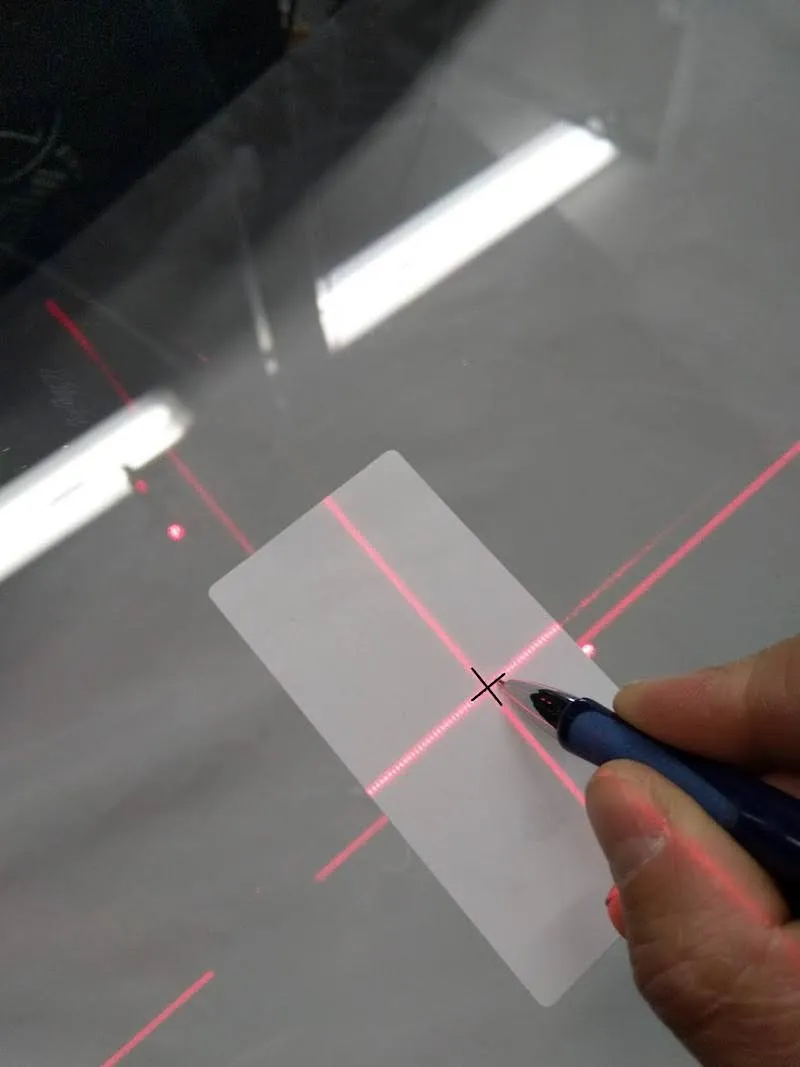
2.1. Wanneer de laser op zijn plaats is bevestigd, plakt u een sticker op de platenplaat ongeveer in het midden van het glas. De lasers worden beter zichtbaar op de sticker, waardoor het centrale punt van de plaat beter kan worden ingeschat.
2.2. Pas beide lasers met de hand aan om ze uit te lijnen op de sticker die het geschatte middelpunt schat.
3. Laseruitlijning verfijnen
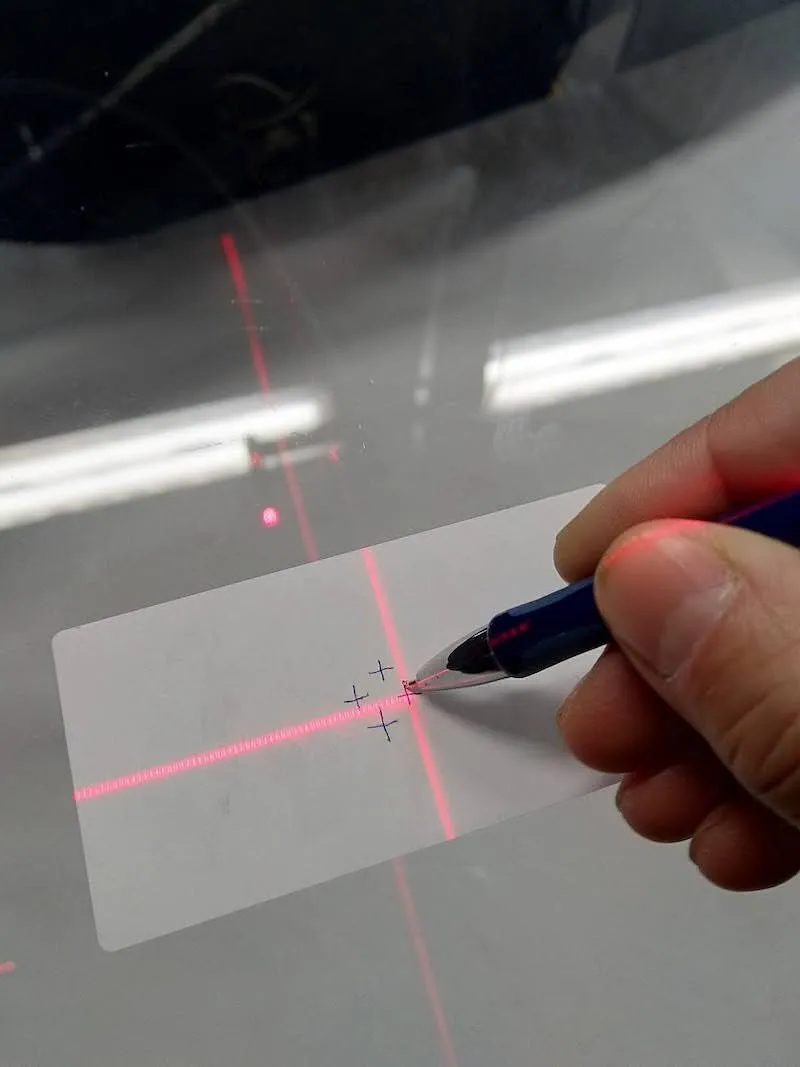
3.1. Trek een klein kruisje op de sticker die het rode kruis van lasers kopieert.
3.2. Start vervolgens de Locator-applicatie op uw mobiele telefoon, zoek de besturingseenheid die aan de robot is toegewezen en open de GUI van de service. Notitie: Raadpleeg voor gedetailleerde instructies over netwerken PhotoRobot Gedetailleerde netwerkvereisten (sectie 8: Bijlage-informatie). Zoek vervolgens de besturingseenheid die aan de robot is toegewezen en open de GUI.

3.3. Gebruik in de service-GUI de draaiknoppen om het glas 90 graden te draaien en traceer de positie van de kruislasers opnieuw op de sticker. Herhaal deze stap twee keer: het glas 90 graden draaien, het laserkruis volgen, 90 graden draaien en het laserkruis een laatste keer volgen.
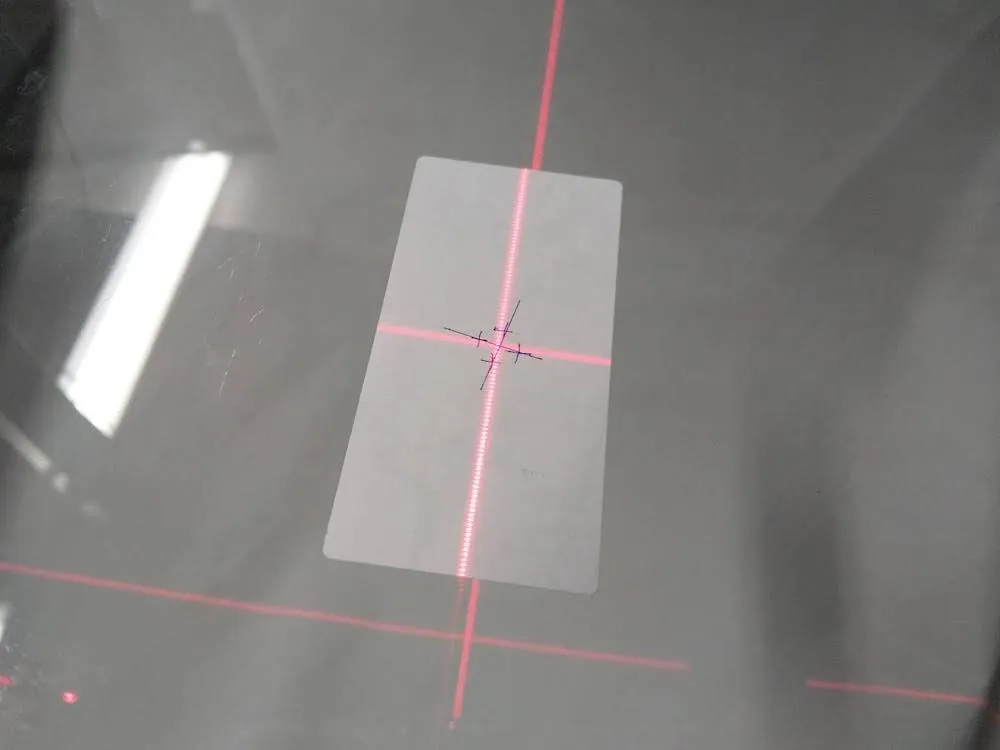
3.4. Nadat u de vier kruisen op de sticker hebt overgetrokken, verbindt u elk tegenoverliggend kruis met rechte lijnen. Het resulterende kruis tussen de afzonderlijke kruisen vertegenwoordigt het werkelijke middelpunt van de glasplaat.
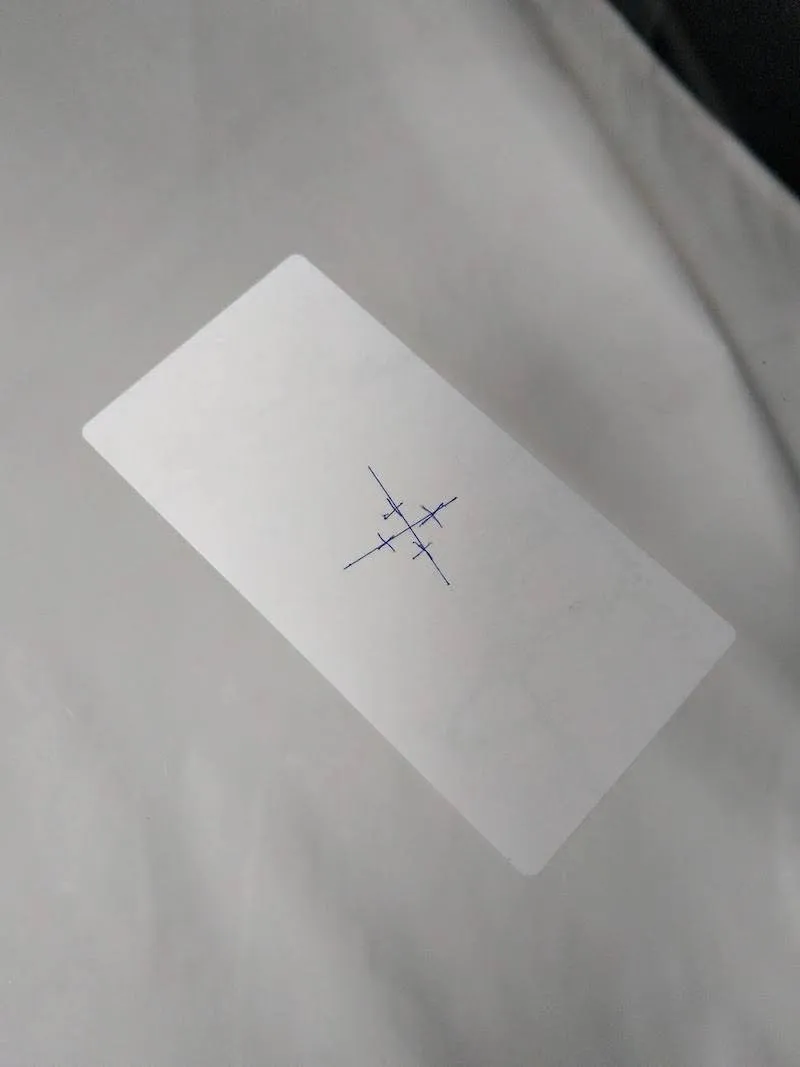
3.5. Stel ten slotte beide lasers in op het geïdentificeerde middelpunt. Het lasersysteem wordt nu gecentreerd en uitgelijnd met het absolute middelpunt van de rotatie van de plaat.
4. C1300 Speciale lasers uitlijnen en centreren
4.1. Let bij het uitlijnen en centreren van de lasers op de C1300-robot op het speciale lasersysteem. Het C1300 lasersysteem heeft verschillende verschillen in vergelijking met andere PhotoRobot's. Hoewel de fysische principes hetzelfde zijn, is de constructie van het C1300-lasersysteem voorzien van een installatie van vier lasers.
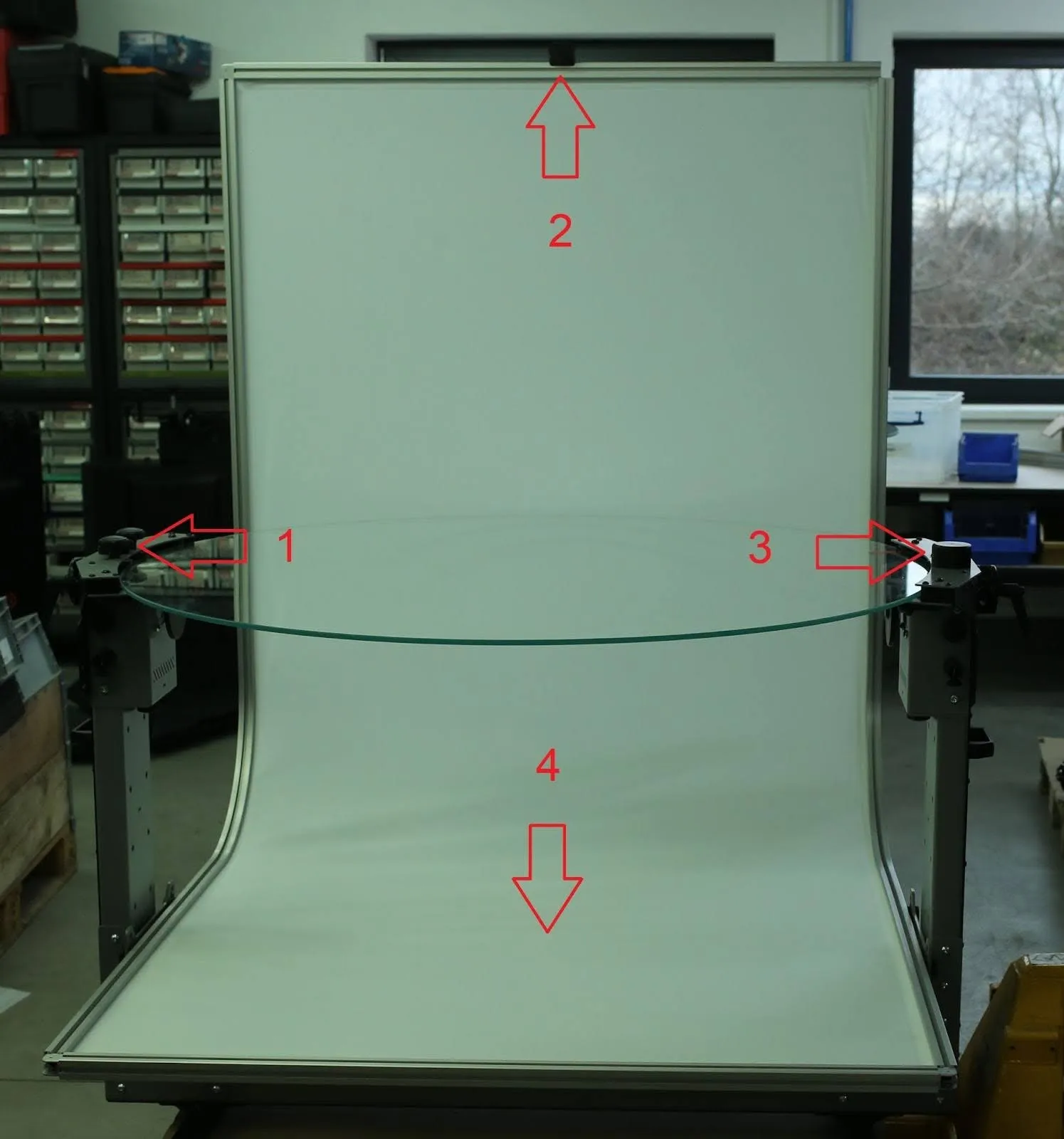
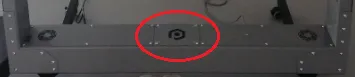
4.2. In dit systeem is Laser 4 een integraal onderdeel van het C1300 robotskelet. Laser 4 is een kruislaser en schijnt vanaf de onderkant door de witte achtergrond. Om de laserpositie aan te passen, zoekt u de vier zilveren schroeven om het centrale vierkante deel van de laser bloot te leggen.
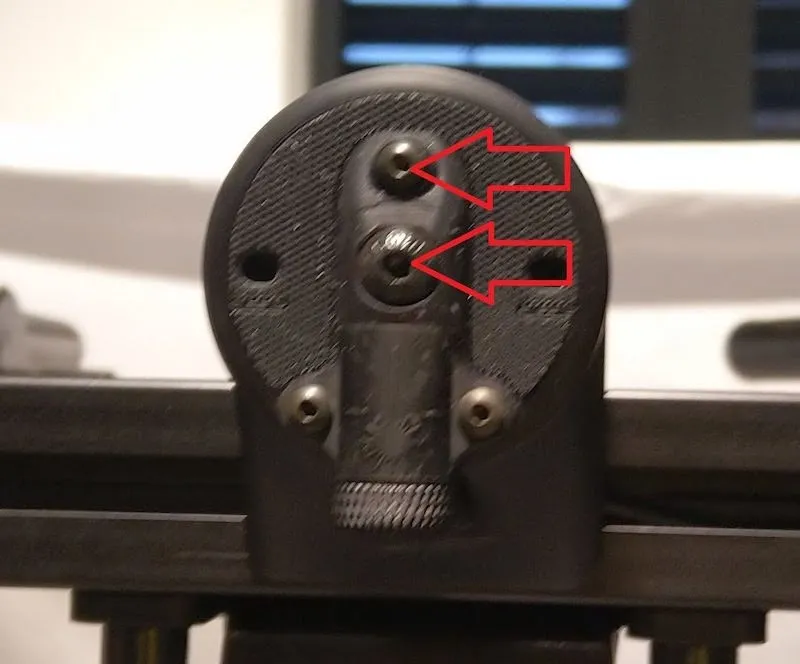
4.3. Nadat u de centrale vierkante onderdeelbehuizing Laser 4 hebt blootgelegd, gebruikt u de twee schroeven waarmee de kunststof laserbehuizing is bevestigd om de positie handmatig aan te passen.
Notitie: Laser 1, Laser 2 en Laser 3 hebben allemaal dezelfde constructie als Laser 4. Het zijn ook allemaal lijnlasers:


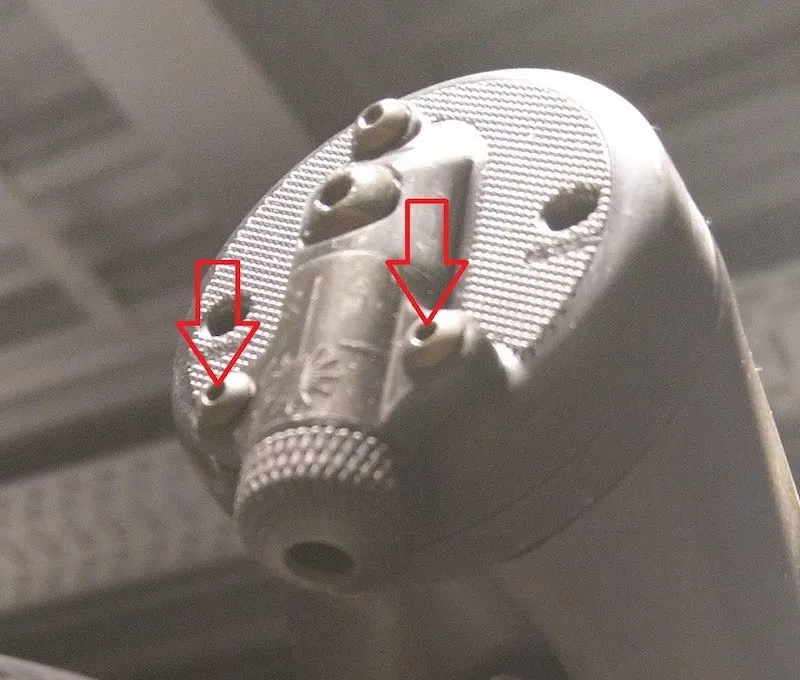

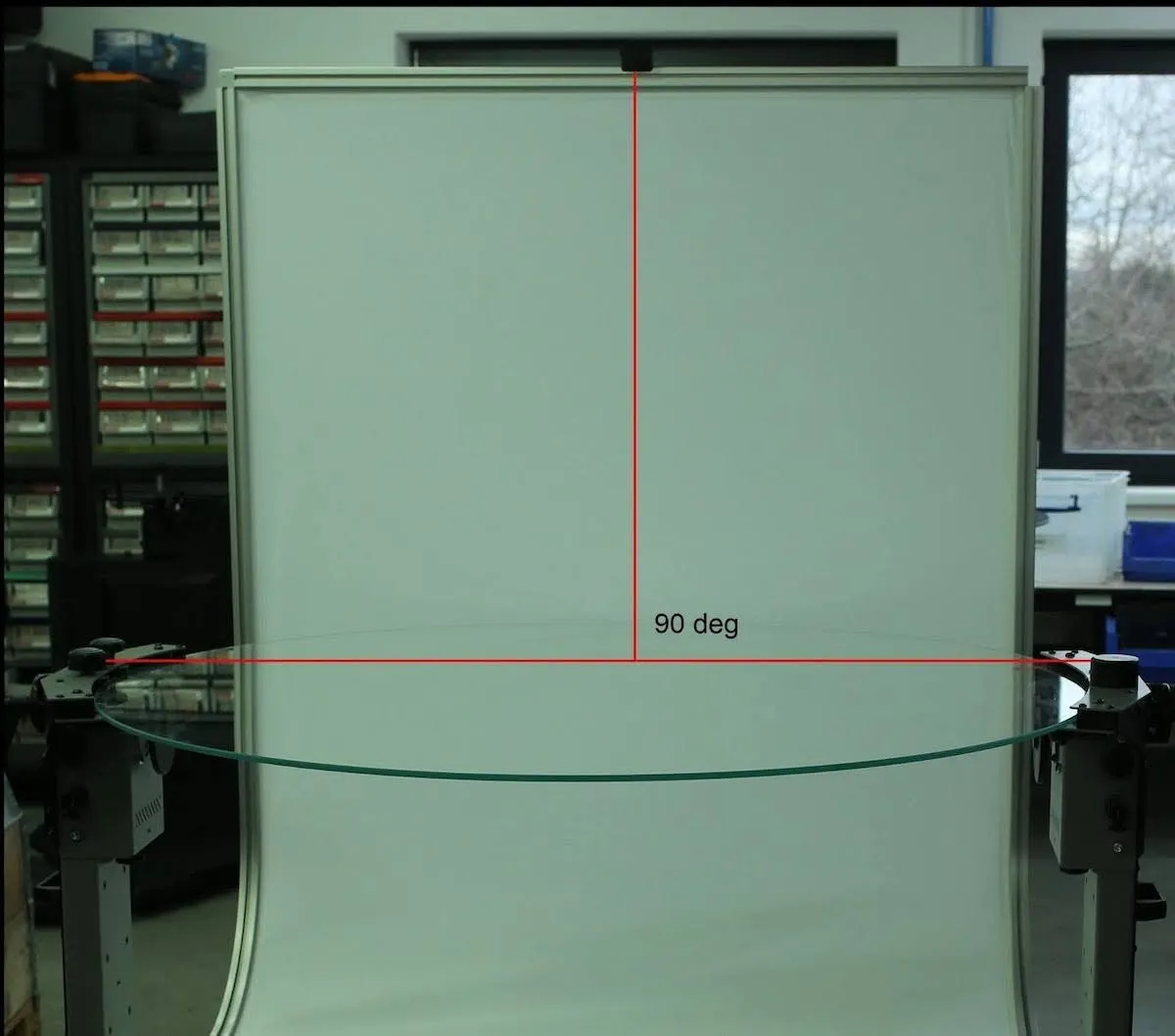
4.4. Zorg er ten slotte bij het uitlijnen en centreren van de lasers voor dat er een hoek van 90 graden is tussen de laserlijn van de bovenste laser en de glasplaat.


EOS Rebel-serie


EOS DSLR-serie


EOS M-spiegelloze serie


PowerShot-serie


Close-up / Handheld

De Canon EOS Rebel-serie biedt beginnersvriendelijke DSLR-camera's met een solide beeldkwaliteit, intuïtieve bediening en veelzijdige functies. Deze camera's zijn ideaal voor fotografieliefhebbers en bieden betrouwbare autofocus, variangle touchscreens en Full HD- of 4K-video-opnamen.
Verbinding
Resolutie (MP)
Resolutie
De Canon EOS DSLR-serie levert beelden van hoge kwaliteit, snelle autofocus en veelzijdigheid, waardoor hij ideaal is voor zowel fotografie als videoproductie.
Verbinding
Resolutie (MP)
Resolutie
De Canon EOS M-spiegelloze serie combineert een compact ontwerp met DSLR-achtige prestaties. Met verwisselbare lenzen, snelle autofocus en hoogwaardige beeldsensoren zijn deze camera's ideaal voor reizigers en makers van inhoud die op zoek zijn naar draagbaarheid zonder in te boeten aan beeldkwaliteit.
Verbinding
Resolutie (MP)
Resolutie
De Canon PowerShot-serie biedt compacte, gebruiksvriendelijke camera's voor casual fotografen en liefhebbers. Met modellen variërend van eenvoudige point-and-shoots tot camera's met geavanceerde zoom, bieden ze gemak, solide beeldkwaliteit en functies zoals beeldstabilisatie en 4K-video.
Verbinding
Resolutie (MP)
Resolutie
De Canon close-up en handheld camera's zijn ontworpen voor gedetailleerde, close-up fotografie en video. Ze zijn compact en gebruiksvriendelijk en bieden nauwkeurige scherpstelling, beeldvorming met hoge resolutie en veelzijdige macromogelijkheden, perfect voor vloggen, productfotografie en creatieve close-ups.
Verbinding
Resolutie (MP)
Resolutie


