PhotoRobot SynchroBox - Functionaliteit & Setup Gebruikershandleiding

De volgende documentatie beschrijft de functionaliteit en installatie van PhotoRobot SynchroBox, de Multi-Camera Controller die de PhotoRobot MultiCam ondersteunt. Deze informatie is bedoeld ter ondersteuning van PhotoRobot-klanten die recentelijk een apparaat hebben aangeschaft en meer dan één camera gebruiken met PhotoRobot. De SynchroBox functioneert als een multi-camera hub die de camerasluiter van twee of meer camera's synchroniseert. Lees verder om de theorie, functionaliteit en installatie van de SynchroBox te begrijpen, om zo een basisbegrip en de eerste bediening van het apparaat te vergemakkelijken.
Belangrijk: De initiële installatie van een PhotoRobot systeem moet altijd worden uitgevoerd door een geautoriseerde PhotoRobot autoriteit. Autoriteiten met toestemming om PhotoRobot te installeren zijn een erkende distributeur, of een vertegenwoordiger van de fabrikant zelf. Raadpleeg bovendien altijd de PhotoRobot Veiligheidsinformatie & Instructies samen met elke handleiding die specifiek bij uw apparaat is geleverd, voordat u PhotoRobot voor het eerst gebruikt.
Opmerking: Voor instructies over de montage en het eerste gebruik van de PhotoRobot MultiCam, raadpleeg PhotoRobot MultiCam en CENTERLESS TABLE Installatie.
SynchroBox Technische Gebruikershandleiding
Dank u wel en gefeliciteerd met uw aankoop van PhotoRobot. PhotoRobot vertegenwoordigt decennia aan eerstehands professionele ervaring en innovatie in geautomatiseerde fotografie. Elk apparaat levert een ecosysteem van kant-en-klare oplossingen, met functies die zijn afgestemd op de unieke behoeften van uw bedrijf.
Welkom bij PhotoRobot. Gebruik de volgende technische informatie om je reis te starten naar het begrijpen en maximaliseren van de productie in de door PhotoRobot aangedreven studio.
1. PhotoRobot SynchroBox - De Theorie
De PhotoRobot SynchroBox is nodig om de camerasluiter te synchroniseren bij het gebruik van twee of meer camera's met PhotoRobot-systemen. SynchroBox functioneert als een multi-camera hub om de opname van individuele frames door verschillende camera's op precies het juiste moment te synchroniseren. Het biedt een oplossing voor het probleem dat zich voordoet bij het werken met camera's met verschillende sluitervertragingen, en ondersteunt in totaal maximaal 8 camera's.
Om de theorie van de SynchroBox te begrijpen, neem bijvoorbeeld de sequenties van standaard capture mode versus fast-spin capture mode met PhotoRobot.
In de standaard capture-modus volgt de volgende volgorde.
a) De plaat beweegt naar de gewenste hoek.
b) De plaat stopt.
c) De camera fotografeert het object.
d) De plaat begint naar de volgende hoek te bewegen.
In dit scenario is geen aanpassing nodig.
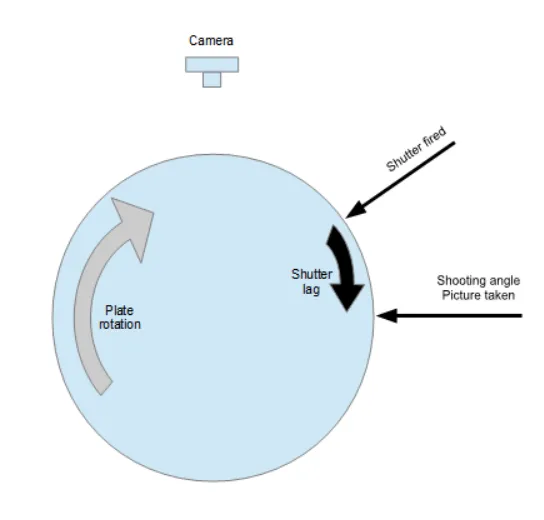
In de fast-spin capture modus vereist de sequentie nog meerdere levels.
a) De plaat begint te draaien met een vooraf bepaalde snelheid.
b) De besturingseenheid herkent dat de hoek van de opname nadert.
c) De besturingsunit vuurt de camerasluiter vooraf af via de sluiterkabel.
d) De camera start het opnameproces (beweging van de sensorgordyn, enz.).
e) Het opnameproces vereist ongeveer 50 milliseconden ("sluitervertraging").
f) De plaat is continu in beweging tijdens de sluitervertraging.
g) De plaat bereikt precies de gewenste hoek wanneer de sluitervertraging van de camera is afgelopen, waarmee de foto wordt gemaakt.
h) De Control Unit herkent dat de volgende opnamehoek nadert, en herhaalt het opnameproces met betrekking tot sluitervertraging.
i) De plaatrotatie eindigt na 360 graden, waardoor alle beweging stopt.
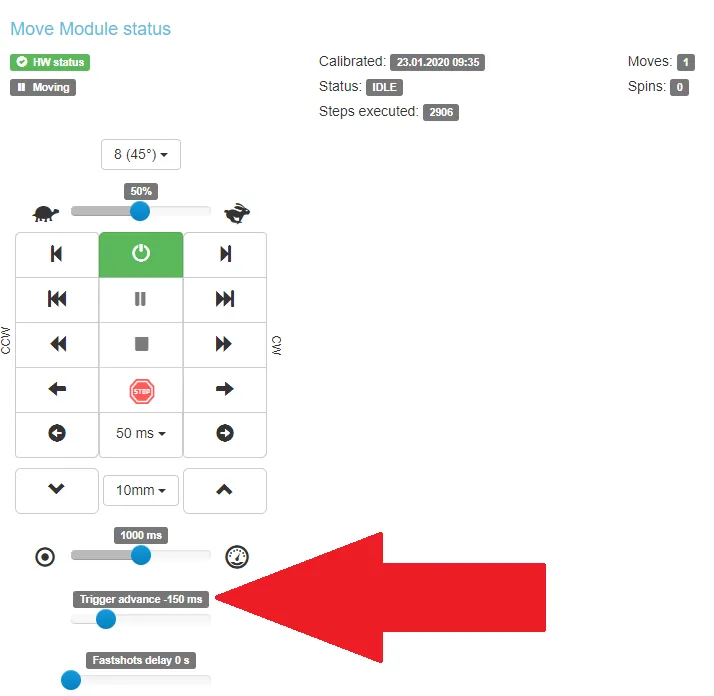
Notitie: Omdat elke camera een andere sluitervertraging heeft, is het noodzakelijk om de sluitervervroeging van de Control Unit voor elke camera aan te passen. Dit is mogelijk voor de Besturingseenheid (Generatie 6) via de service-GUI met de optie "Trigger advance". De waarde "Trigger advance" moet hoger zijn dan de sluitervertraging van de camera. Als bijvoorbeeld de sluitervertraging van de camera 80 ms is, dan moet de "Trigger advance" ongeveer gelijk aan of groter zijn dan 90 ms.
2. Apparaatbeschrijving - PhotoRobot SynchroBox
De SynchroBox is bij ontwerp een rackmount apparaat dat is ontworpen voor de synchronisatie van de camerasluiters van twee of meer camera's. Het is noodzakelijk bij het bedienen van elk PhotoRobot-systeem met meer dan één camera tegelijk. One SynchroBox ondersteunt tot 8 camera's, wat een oplossing biedt om verschillende sluitervertragingen van de gebruikte camera's te omzeilen.


Neem bijvoorbeeld een scenario waarin twee camera's en alleen een SynchroBox als splitter voor beide camera's worden gebruikt, zonder extra setup. Tegelijkertijd is de waarde van de Control Unit G6 "Trigger advance" nul. De sluiter wordt vervolgens afgevuurd wanneer de plaat de gewenste hoek bereikt.
In dit geval zijn de stappen van de reeks:
a) De plaat bereikt de gewenste hoek.
b) De Besturingseenheid vuurt de camerasluiter af via de sluiterkabel.
c) De sluitervertraging van beide camera's telt af terwijl de plaat continu in beweging is.
d) De eerste camera maakt de foto 50 ms na het gewenste opnamepunt met behulp van "gewenste hoek + X" graden.
e) De tweede camera neemt het beeld 70 ms na het gewenste opnamepunt vast met behulp van "gewenste hoek + Y" graden.
f) De graden van de "Y"-waarde zijn groter dan de graden van de "X"-waarde.
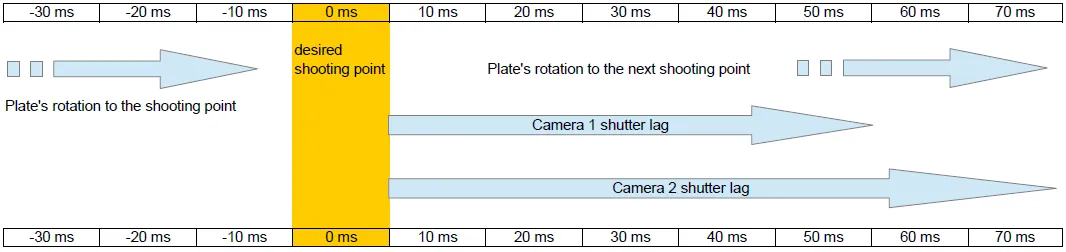
Daardoor wordt er geen foto vastgelegd van de gewenste hoek. Daarom is aanpassing noodzakelijk zodat beide camera's het gewenste opnamepunt op het juiste moment fotograferen.
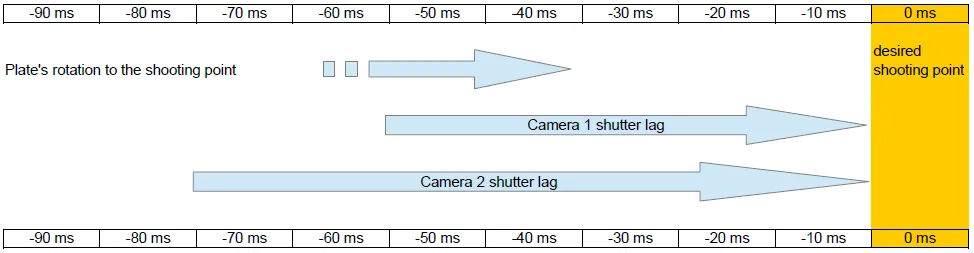
Hiervoor ontvangt de SynchroBox een "shutter fired" puls van de Control Unit G6 en identificeert automatisch de lengte van de puls.
Daarnaast heeft de SynchroBox de sluitervertraging voor elke aangesloten camera, die handmatig werd ingevoerd bij het opzetten.
Met deze twee parameters telt en vuurt de SynchroBox de sluiter van elke camera af met de juiste vooruitgang.
3. Hoe je sluitervertraging van de camera meet
Om de sluitervertraging van de camera te meten, is het noodzakelijk een PhotoRobot met een willekeurige roterende plaat, de Control Unit G6+, en een camera die via sluiterkabel met de Control Unit is verbonden.
Vervolgens moet een lokale computer met PhotoRobot Controls App Software via USB-kabel op de camera worden aangesloten.
Tot slot is een gradenmeter van 360 graden (online te downloaden) noodzakelijk om de volgende stappen te voltooien.
a) Plaats de gradenboog op de PhotoRobot-apparaatplaat, met een aanwijzer die buiten de plaat is geplaatst en naar de rand wijst.
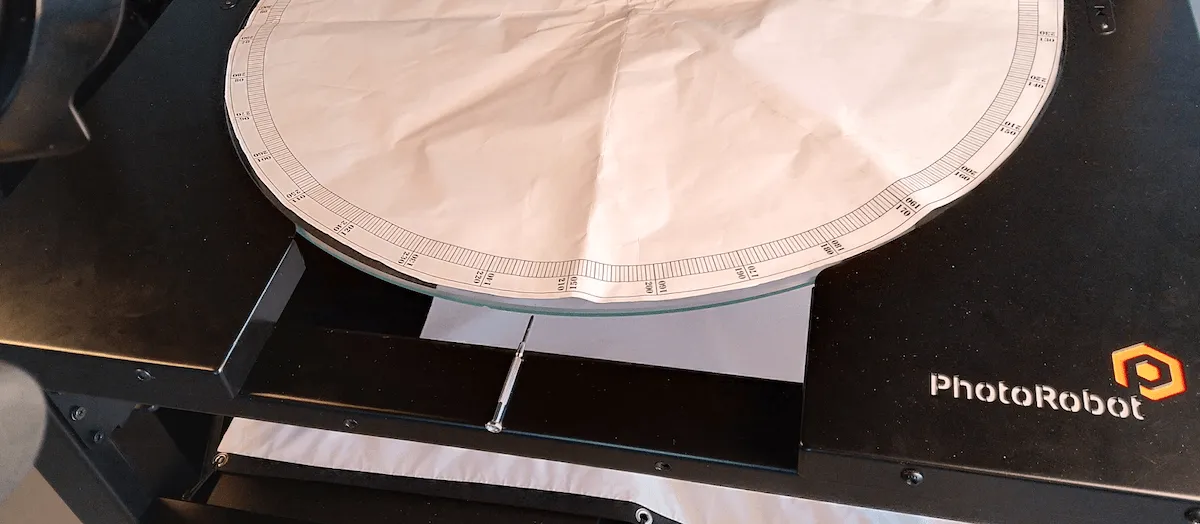
b) Draai de plaat totdat de wijzer op nul staat. Opmerking: Deze stap is mogelijk met de hand, zelfs wanneer de elektrische motoren zijn uitgeschakeld.
c) Start de PhotoRobot Controls App-software, log in op je account en maak een item aan via de werkruimte, rekening houdend met de opgegeven configuratie. Open vervolgens de Capture-modus en open de map "Overig".
d) Vervolgens opent u in een nieuw tabblad in uw browser de service-GUI van de Control Unit (G6), die controle over de plaat biedt via het IP-adres.
e) In de service-GUI stelt u de robot in met de volgende parameters:
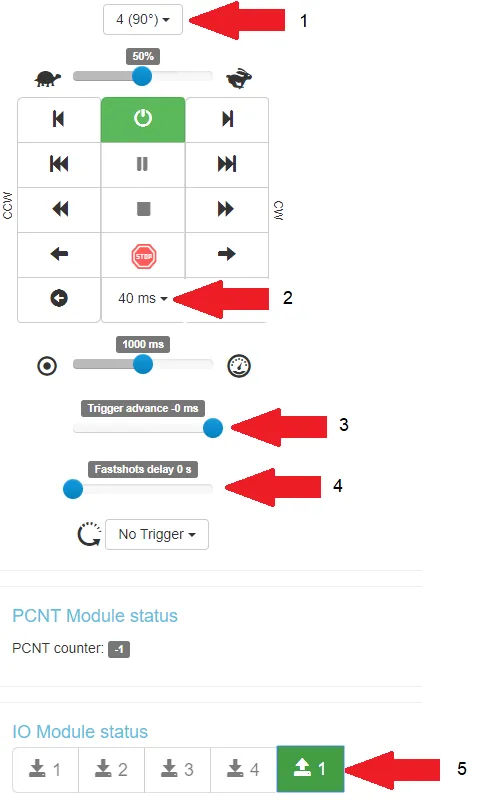
- 1 = 4 foto's bij 90 graden;
- 2 = 40 ms pulslengte voor het activeren van de sluiter;
- 3 = trigger-advance 0 ms (geen advance);
- 4 = geen fastshots vertraging
- 5 = halve druk op de sluiter wordt geactiveerd
f) Start de sequentie door op de rechterpijl rechtsonder in het configuratiescherm te klikken:
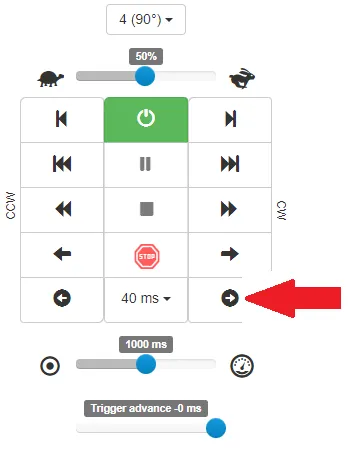
Notitie: De sequentie begint op 90 graden en eindigt op 0 graden. Tegelijkertijd worden alle foto's vastgelegd in de map "Overig" in de Controls-app, zoals eerder ingesteld.
Zie bijvoorbeeld de volgende sample-uitgangen (met een roterende richting naar links):
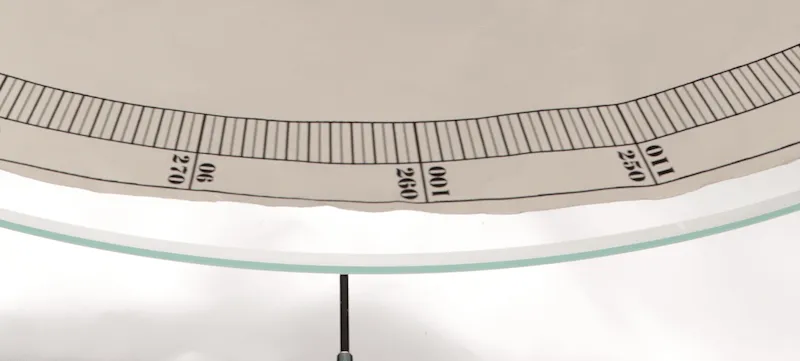
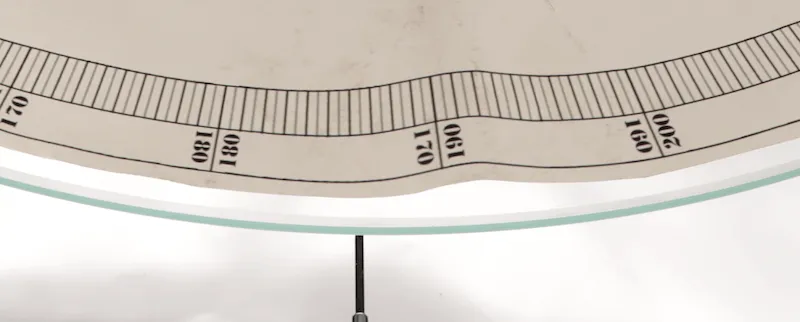
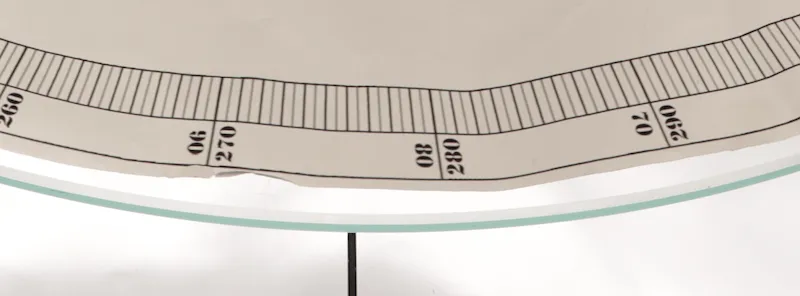
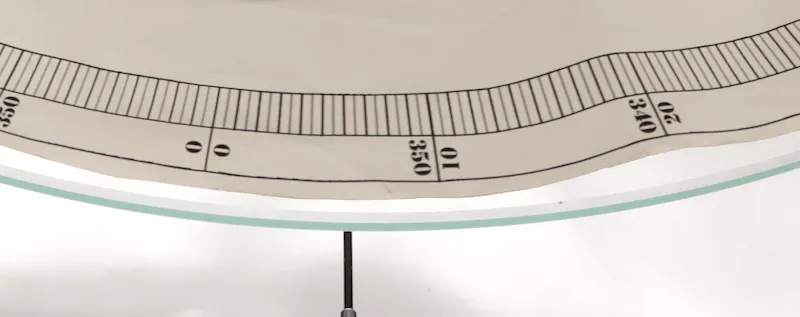
- Notitie: In deze voorbeelden was beeldopname ongeveer 6 graden na het afvuren van de trekker.
g) Vervolgens, om 6 graden om te zetten in het aantal milliseconden (ms) in dit geval, start de continue rotatie van de plaat van PhotoRobot met dezelfde snelheid als de vorige stap in de service-GUI.
- Start een stopwatch en registreer de tijd voor 10 rondes.
- In dit testgeval is de resulterende waarde 61 seconden (61.000 ms).
- Dat betekent dat 10 kogels gelijk zijn aan 10 * 360 graden (3.600 graden).
- Er is een beweging van 1 graad die 61.000 ms / 3.600 graden duurt, wat overeenkomt met 16,94 ms.
- Er is een tijdsbeweging van 6 graden die 16,94 ms * 6 duurt, wat gelijk is aan 101,64 ms.
- De geschatte sluitervertraging is dus ongeveer 102 ms.
h) Ten slotte is het noodzakelijk alle voorgaande stappen te herhalen om de sluitervertraging voor elke gebruikte camera te identificeren.
4. SynchroBox Setup
Voor de installatie van de SynchroBox is een vereiste dat er een Control Unit (G6) is geïnstalleerd en volledig operationeel. Bovendien zijn er idealiter 2 of meer camera's van dezelfde fabrikant en van hetzelfde model, elk met een bekende sluitervertraging.
Gebruik in dit geval de volgende stappen om de SynchroBox in te stellen.
4.1. Verbind de SynchroBox met de Control Unit G6 via sluiterkabel. Opmerking: Deze sluiterkabel wordt door PhotoRobot geleverd als onderdeel van de SynchroBox-levering, of onder het onderdeelnummer KHCAR1R05. De sluiterkabel verbindt de Control Unit G6 "OUT" poort met de SynchroBox "->IN" poort (de kleinere, niet de andere "=>IN").
4.2. Verbind de SynchroBox met het netwerk via een standaard ethernetkabel, met hetzelfde subnet dat aansluit op de Control Unit.
4.3. Verbind alle camera's die in gebruik zijn met de SynchroBox via sluiterkabels.
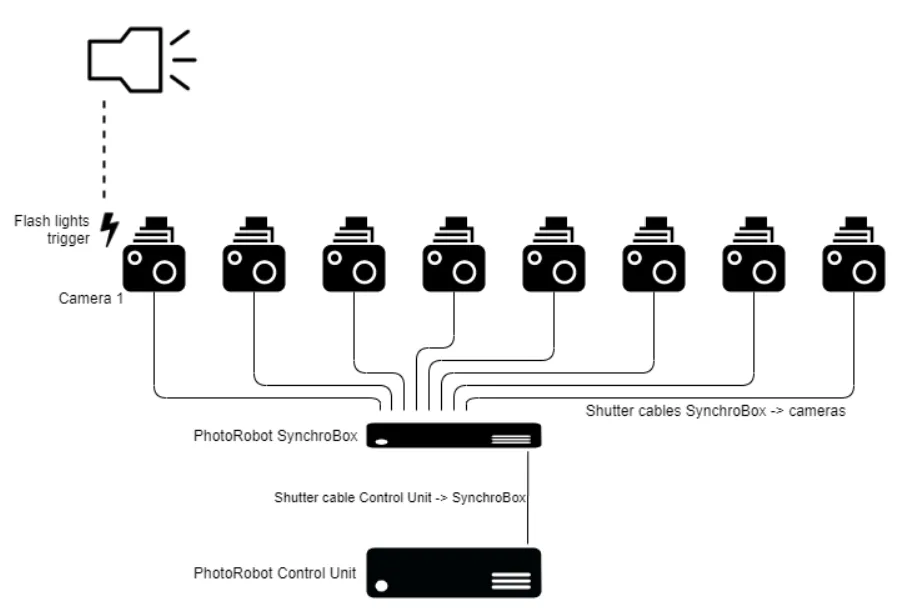
Notitie: De sluiterkabels voor de SynchroBox naar de camera's worden geleverd door PhotoRobot onder de onderdeelnummers KHCARCJ (Canon Jack 2,5 mm Connector) of KHCARN3 (Canon N3 connector) plus de verlenging KHCAR1R05, of als een zogenaamde sluiterkabelset.

4.4. Wees je ervan bewust dat Camera 1 (poort 1 van de SynchroBox) het triggerapparaat van de flitslichten vasthoudt en bedient. Deze camera moet de grootste sluitervertraging hebben.
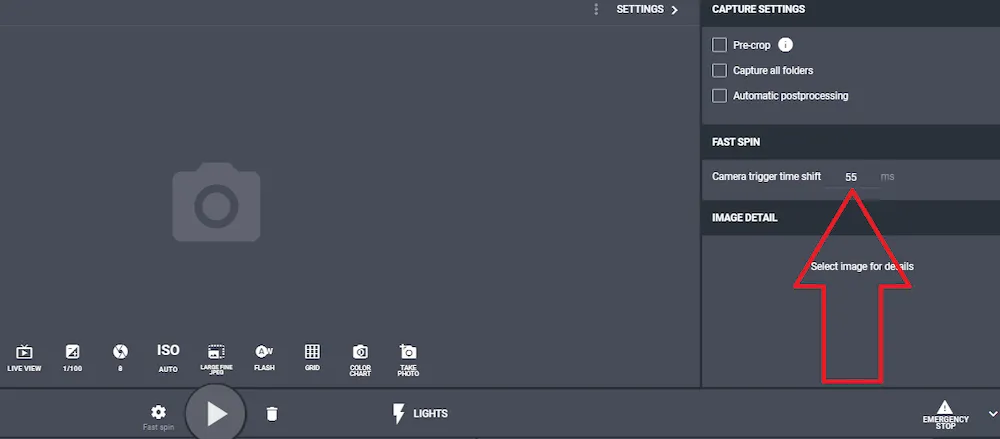
4.5. Stel de waarde van de Control Unit (G6) "Trigger advance" in volgens de sluitervertraging van de langzaamste camera (eerder beschreven in sectie 1 van dit document). Opmerking: Bij het gebruik van de PhotoRobot Controls App, wees je ervan bewust dat deze waarde wordt aangepast / vervangen door de waarde die is ingesteld voor de Capture mode - Fast Spin:
4.6. Vervolgens opent u de service-GUI van de SynchroBox door het IP-adres in URL-formaat in uw webbrowser in te voeren.
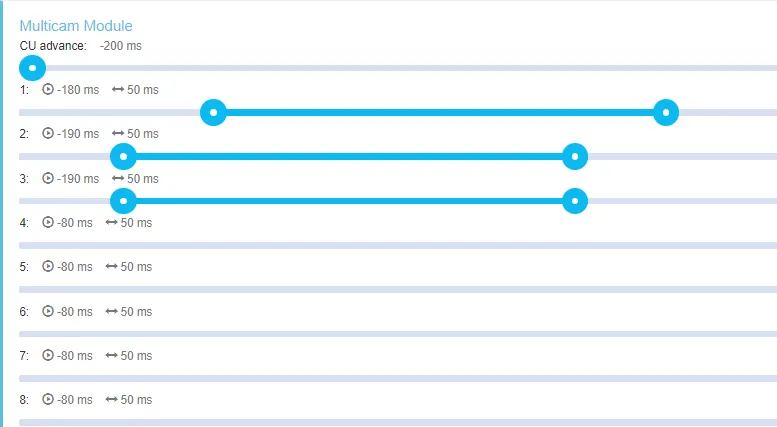
4.7. Stel de eerste schuifregelaar "CU advance" in op dezelfde waarde als in de Control Unit, of op een overeenkomstige waarde in PhotoRobot Controls. Let op: Wees je ervan bewust dat als deze twee waarden verschillen, de waarde in PhotoRobot Controls voorrang krijgt. Vervolgens zijn er 8 schuifregelaars die overeenkomen met de 8 poorten op de SynchroBox. De schuifregelaars hebben elk twee waarden: de vooruit (linker knop) en de lengte van de puls (rechter knop). De geavanceerde waarde is gelijk aan de sluitervertraging van de gecontroleerde camera (met de kleinste reële waarde ongeveer -50 ms). De lengte van de puls hangt dan samen met het tijdsbestek waarin de sluiterkabel van de camera contact houdt. Deze waarde wordt door de camerafabrikant opgegeven of, indien onbekend, ingesteld op 40 - 60 ms.
4.8. Het invoerkanaal instellen in de SynchroBox-service GUI. Opmerking: Bij gebruik van de sluiterkabels van PhotoRobot is de opstelling altijd als volgt.
- In haven: A = focus, B = trigger
- Poort 1 - 8: A = trigger, B = focus
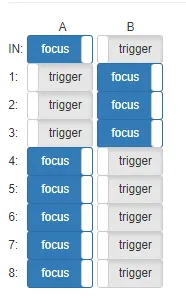
- Let op dat er in het bovenstaande voorbeeld alleen camera's 1, 2 en 3 zijn opgesteld.
- Omdat PhotoRobot bedoeld is om flitslichten te gebruiken, stel je camera 1 sluitertijd in op 1/100 of 1/125.
4.9. Stel tenslotte de initiële opstelling van alle andere camera's in op een veel langere sluitertijd, bijvoorbeeld 1/30 - 1/60. Dit helpt om rekening te houden met het mogelijke verschil in sluitervertragingen tussen de gebruikte camera's. Het langere tijdsbestek zorgt er ook voor dat alle camera's het piek van de flitser van alle strobo's inhalen. Wanneer het correct werkt, is het dan mogelijk om te experimenteren door indien nodig de sluitertijd van de andere camera's te verlagen.
5. Meerdere SynchroBox-opstelling
De SynchroBox ondersteunt maximaal 8 camera's. Als meer dan 8 camera's nodig zijn, is het dan mogelijk het aantal gebruikte SynchroBoxes te vermenigvuldigen.

- Verbind de OUT-poort van de eerste SynchroBox met de IN-poort van de volgende SynchroBox, met dezelfde sluiterkabel die de Control Unit met de SynchroBox verbindt. Deze sluiterkabel wordt door PhotoRobot geleverd als onderdeel van de SynchroBox-levering of onder het onderdeelnummer KHCAR1R05.


EOS Rebel-serie


EOS DSLR-serie


EOS M-spiegelloze serie


PowerShot-serie


Close-up / Handheld

De Canon EOS Rebel-serie biedt beginnersvriendelijke DSLR-camera's met een solide beeldkwaliteit, intuïtieve bediening en veelzijdige functies. Deze camera's zijn ideaal voor fotografieliefhebbers en bieden betrouwbare autofocus, variangle touchscreens en Full HD- of 4K-video-opnamen.
Verbinding
Resolutie (MP)
Resolutie
De Canon EOS DSLR-serie levert beelden van hoge kwaliteit, snelle autofocus en veelzijdigheid, waardoor hij ideaal is voor zowel fotografie als videoproductie.
Verbinding
Resolutie (MP)
Resolutie
De Canon EOS M-spiegelloze serie combineert een compact ontwerp met DSLR-achtige prestaties. Met verwisselbare lenzen, snelle autofocus en hoogwaardige beeldsensoren zijn deze camera's ideaal voor reizigers en makers van inhoud die op zoek zijn naar draagbaarheid zonder in te boeten aan beeldkwaliteit.
Verbinding
Resolutie (MP)
Resolutie
De Canon PowerShot-serie biedt compacte, gebruiksvriendelijke camera's voor casual fotografen en liefhebbers. Met modellen variërend van eenvoudige point-and-shoots tot camera's met geavanceerde zoom, bieden ze gemak, solide beeldkwaliteit en functies zoals beeldstabilisatie en 4K-video.
Verbinding
Resolutie (MP)
Resolutie
De Canon close-up en handheld camera's zijn ontworpen voor gedetailleerde, close-up fotografie en video. Ze zijn compact en gebruiksvriendelijk en bieden nauwkeurige scherpstelling, beeldvorming met hoge resolutie en veelzijdige macromogelijkheden, perfect voor vloggen, productfotografie en creatieve close-ups.
Verbinding
Resolutie (MP)
Resolutie


